
TPD: Group 4
Version 2.1 by Hugo van Dijk on 2023/03/09 12:51
Group 4:
| Problem | The Humanoid Robot has to manage the amount of physical activities the PwD in the carehome did. He has to motivate the person with the lowest count to go on a walk in the garden. He will use either goal-based or motivation-based explanations for his motivation. He has to accompany the PwD on their walks. While walking he manages the route and provides smalltalk. |
| Solution Structure | 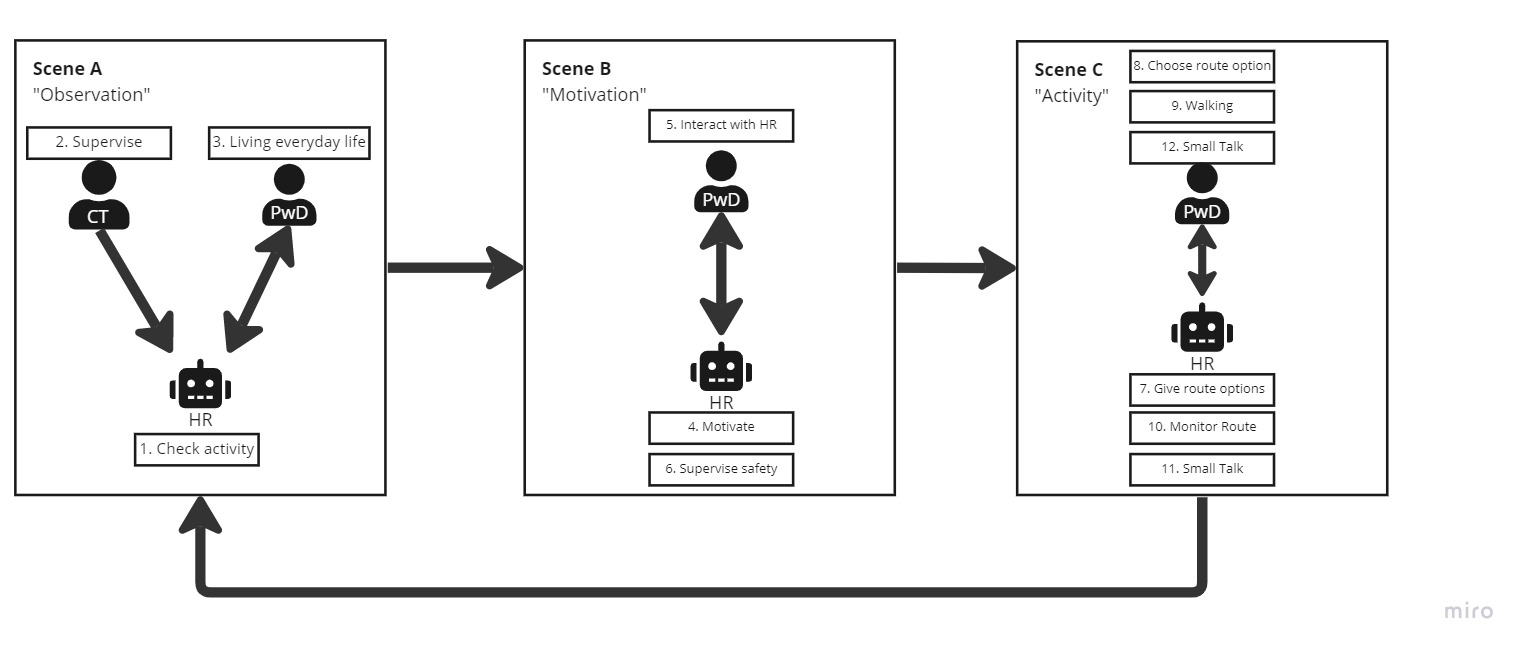 |
| Solution Description | All actors (caretaker, humanoid robot, players) are co-located
|
| Human RQ |
|
| Machine RQ |
|
| Consequences | + Offload of caretaker so that they can focus on more involving health related activities + Healthy for PwD + Sense of independency + Social for PwD - Robot can be perceived as annoying and thus ignored by PwD - Privacy issues - Hardware limitations of robot |
| Grounding | Action sequence Observation scene: 1. Check activity level of all PwD 2. Choose lowest for PwD that is able to walk 3. The CT verifies the choice Action sequence Motivation scene:
Action sequence Activity scene:
|
| Related Patterns |