Functions
For our project we wanted to make use of the Miro. However, a companion robot like the Sony Aibo might be more suitable for our purpose, since it has legs instead of wheels.
There are two main functions of the Miro that we want to design for:
- Walking with the Miro
- Engage in snoezelen with the Miro
These functions are described and laid out in the sections, flowchart and storyboards below.
Walking with the MiRo
Walking with the MiRo is divided in two functional parts: Starting the walk and guiding the patient on the path.
Starting the walk
The MiRo should be programmable with various walking routes. These walking routes will be created by the activity coordinator, as they have the best knowledge about what is most suitable for each patient. We also assume that, in general, the patients with dementia are not able to choose a good/suitable walking path by themselves, and therefore think that placing this responsibility at the activity coordinator is the best option.
The patient should have a way of indicating that he/she wants to take a walk (for example in the form of a button). Once the patient presses the button, a caretaker will come and bring the MiRo so that the patient can start the walk. The caretaker will also attach the proximity bracelet, see section ??? for its description. MiRo will then automatically load a walking route based on the walks specified by the activity coordinator.
Guiding the patient
To guide the patient along the walking route, MiRo will walk ahead.
- Walking and following a path
- Walk ahead in the desired direction
- Indicate which way to go by already slightly moving towards the desired direction/turn.
- Positive reinforcement when human does well with excited sounds and wagging tail (dog emotions)
2. Guiding human back on path
Description
- Determine when the human going off the path
- Getting attention of the human
- Noises
- Tilting head
- Going towards human, gently blocking path
- Alerting caretakers when human does not return to path
3. Snoezelen
Todo:
- Armband functies, ook redeneren waarom dit ipv lijntje ivm kwetsbaarheid van robot (ook al besproken bij Humanoid Robot)
- Hulp inschakelen functies (gps tracker)
-
Flowchart: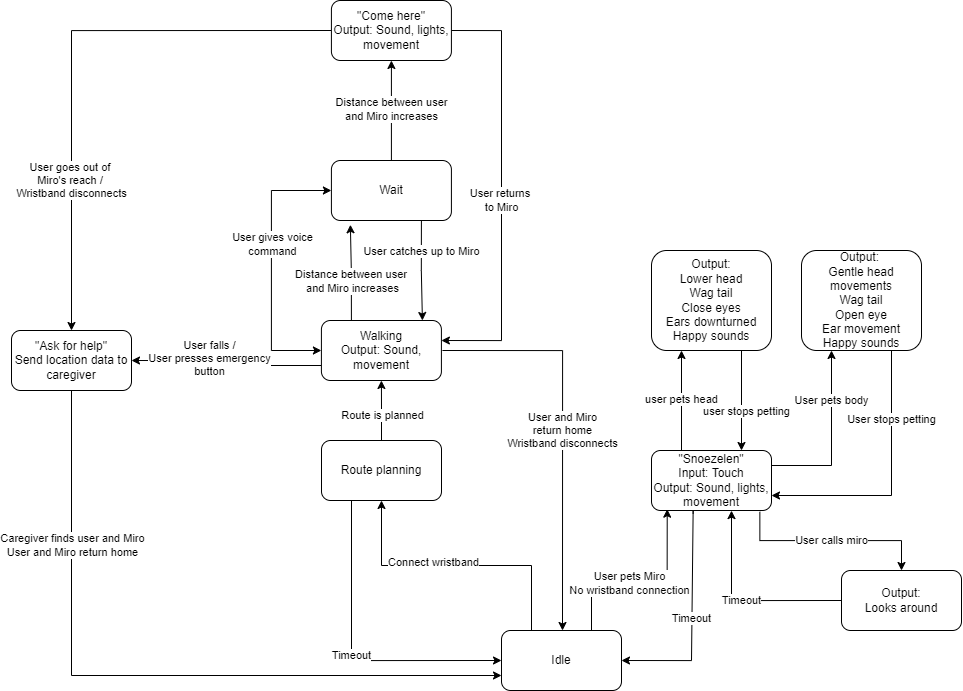
Storyboard compliant who likes dogs:
Storyboard reluctant elder who doesn't like dogs or doesn't want to be led by a dog (Constantijn)
Storyboard for a fallen PwD: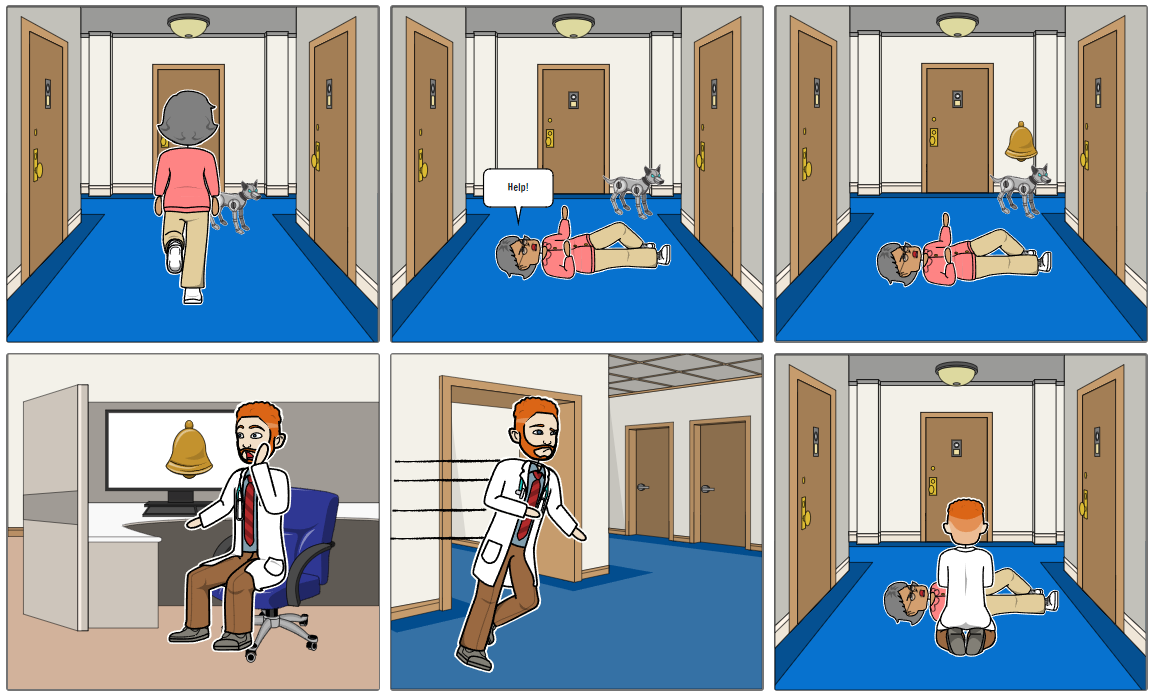
Storyboard for a PwD who is very social and talks in the hallway: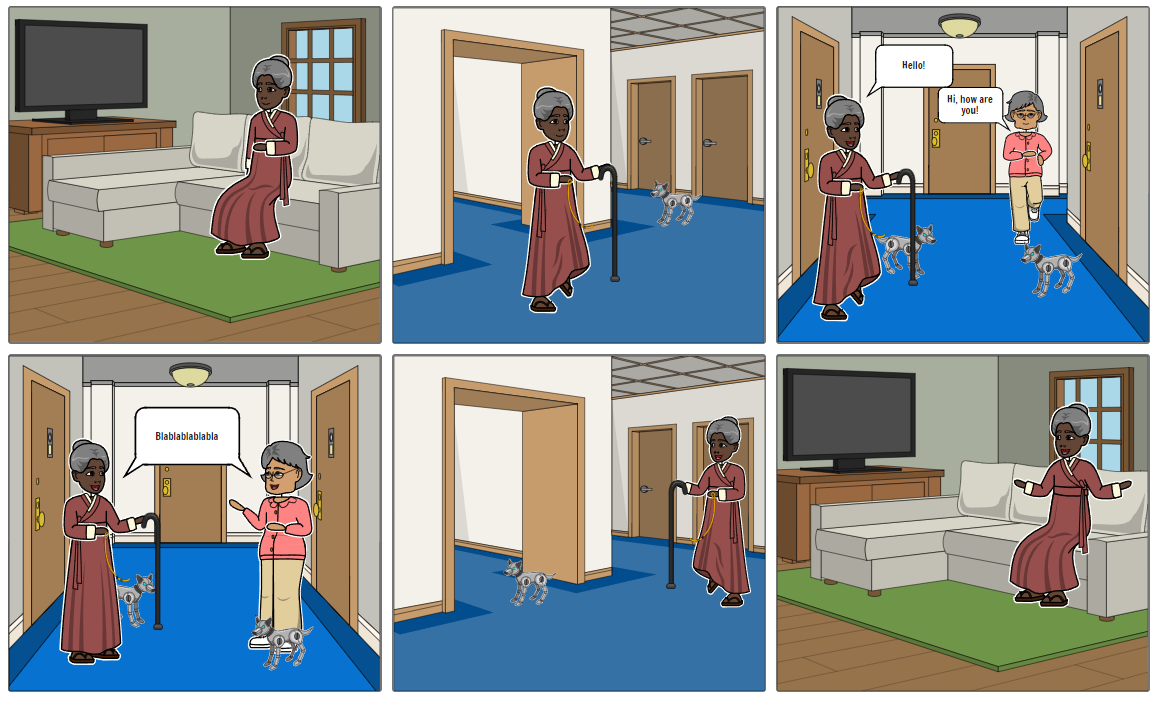
Storyboard for a petting session with the robot dog: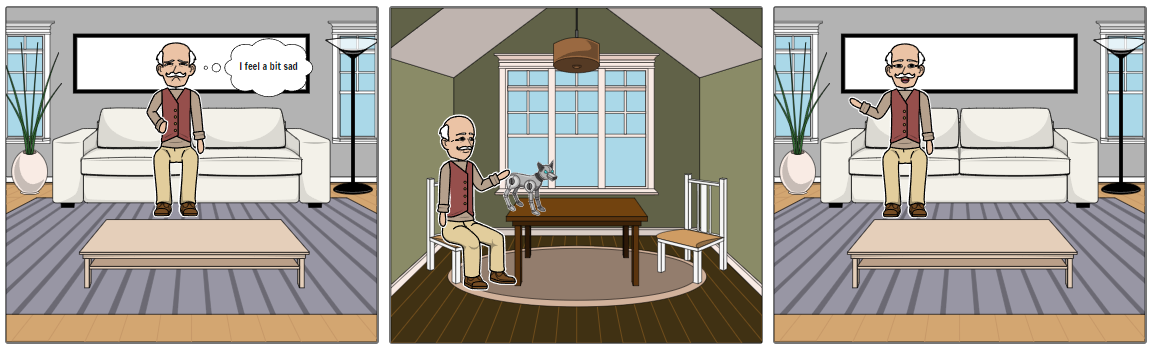
Storyboard for a petting session with the robot dog for Contantijn (person who doesn't like dogs):