Test
Problem statement and research questions
People with dementia often forget to eat and drink, leading to dehydration, malnutrition and decreased wellbeing in general. Our prototype engages in discourses to remind PwD to have lunch and drink water, using the Nao robot platform. The discourse aims to reming the PwD without causing any anxiety or embarrassment which a traditional "alarm" system could cause, and keep them company throughout these activities.
The four research questions studied in this evaluation are:
- Does the robot remind the PwD of their hunger?
- Does the music make the eating more enjoyable for the PwD?
- Does the PwD experience less negative emotions, such as agitation, sadness, embarrassment, after the interaction with the 'intelligent' robot?
- * Does the robot cause PwD to eat more regularly?
* This research question is difficult due to the practical limitations in designing the experimental setup and as such is left to lesser importance.
Method
The prototype was evaluated with an in-person experiment with multiple participants.
Participants
As there are practical difficulties with conducting the experiment with actual people with dementia due to both time constraints and COVID, our participants' group consists of peers from other groups and friends. In total we had 19 people take part in our experiment.
Experimental design
For the experiment we used a within-subject design. All of the participants interacted with both versions of the robot, with half of the participants interacting with the version 1 first and then version 2, and the other half in reverse order. This was done to counter-balance the carryover effects. Snacks were made available for the participants, in case they were prompted and they ewre hungry. The participants were unaware of the possibility of eating snacks, to prevent disturbing the interaction with the robot. Otherwise the subjects would have been primed for eating, which would have biased the results and hide the effect of the robotic interaction.
Tasks
The participant interacted with the robot, which was programmed to engage in a lunch discourse. Two versions were implemented: the first version asks basic questions about mealtime, mostly acting as a reminder for the PwD to have lunch (basically an alarm clock). The second is our original implementation of it with the more sophisticated discourse and music.
Measures
We measured the effectiveness of the discourse, both physically and emotionally. Our quantitative measure was whether the person ate the lunch they were supposed to have eaten, and the qualitative measure was the emotions that the PwD experienced before, during, and after the interaction. The qualitative measures were recorded with a simple questionnaire. Some people were not hungry enough to be prompted to have something to eat, which disturbed the results. However we did measure whether the robot reminded someone of their hunger and if they ate.
Procedure
The procedure was conducted as follows:
- Welcome participant and explain what they are going to be doing.
- Have them sign the permission form.
- Complete questionnaire 1 regarding their emotional state (control).
- Have an interaction with version A of the robot.
- Complete questionnaire 2 (extended version).
- Have a short interview during downtime (prepared questions).
- Have an interaction with version B of the robot.
- Complete questionnaire 3 (extended version).
- Have a short interview during downtime (prepared questions).
We used the "Wizard of Oz" method for recognizing agreement and disagreement, to make sure that the whole process did not depend on voice recognition being good enough. In practice, this meant that someone was pressing "y" and "n" on the keyboard according to the participants answers in a place the participant did not see, such as behind them.
Material
For the experiments, we used the NAO robot platform, and a laptop to control it with. The participants completed the questionnaires on their phones by scanning a QR code. The questionnaires are a combination of questions regarding the emotional state of the participants, their interaction with the robot, and the music included in the interaction. Stroopwafels and water in a clean cup were made available to see and measure how much people ate.
Below are listed the contents of the three questionnares:
Questionnare 1:
- Consent Form and Disclaimers
- Control for robot version A
Questionnare 2:
- Questions about robot version A
- 3 food-related questions of our own (5-point Likert scale)
- 2 music-related questions of our own (5-point Likert scale)
- Control for robot version B
Questionnare 3:
- Questions about robot version B
- 3 food-related questions of our own (5-point Likert scale)
- 2 music-related questions of our own (5-point Likert scale)
Practicalities
Before the experiment we:
- did a practice round by ourselves
- This was filmed to have a controlled performance to give an example of the experiment if needed
- contacted other groups and decide on scheduling
- Each participant was booked a 20 min slot
- reserved the lab
- bought the stroopwafels
Results
The results were gathered from 19 personnel, all of whom interacted first with one version of the robot and then the other. 10 of the participants interacted first with the simple version, nine having their first interaction with the advanced version.
Eating
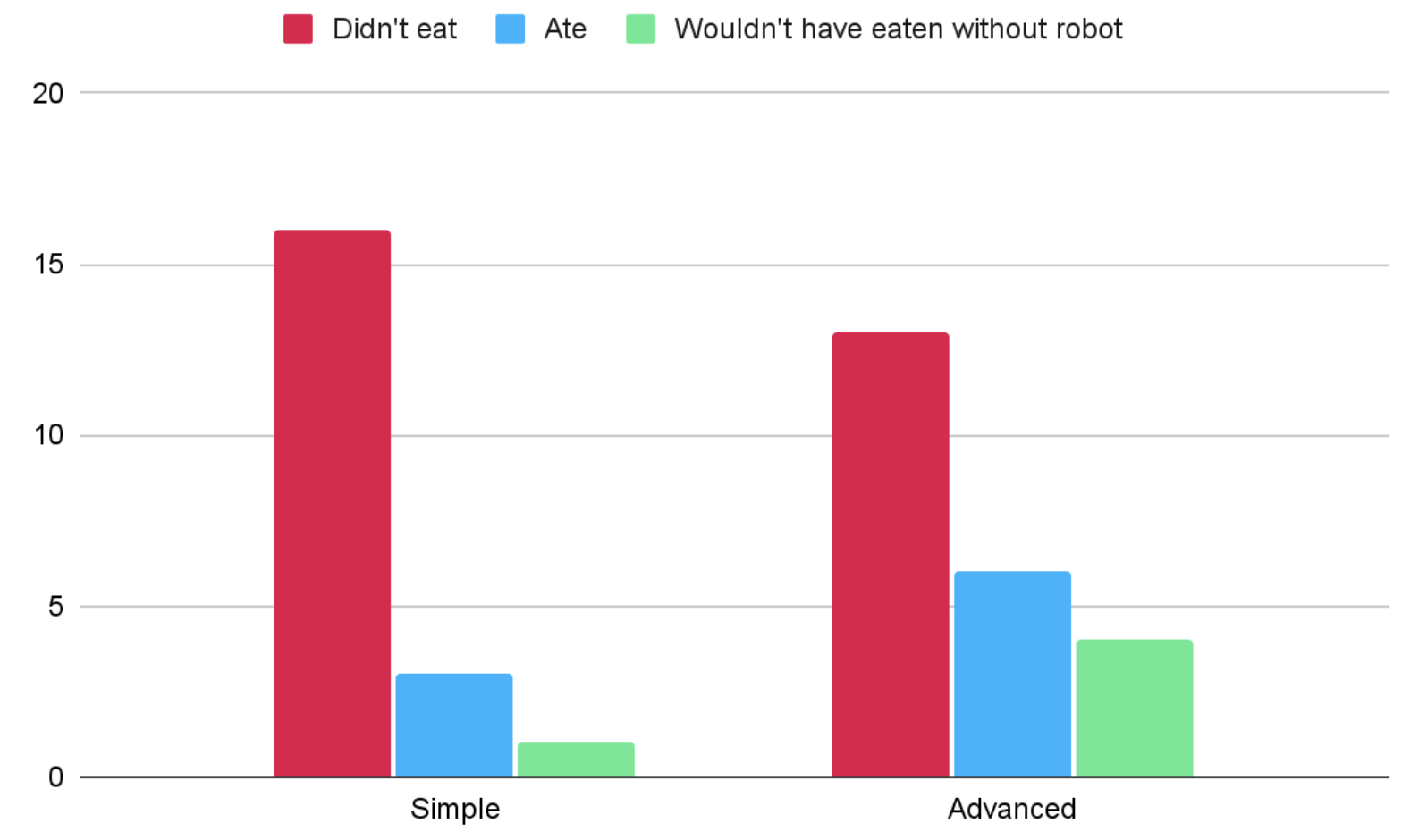
Figure 1: Results on the eating of the test personas during the experiment
Simple robot:
- 16% ate
- 33% of those would not have eaten without the robot
Advanced robot:
- 32% ate
- 67% of those would not have eaten without the robot
Music
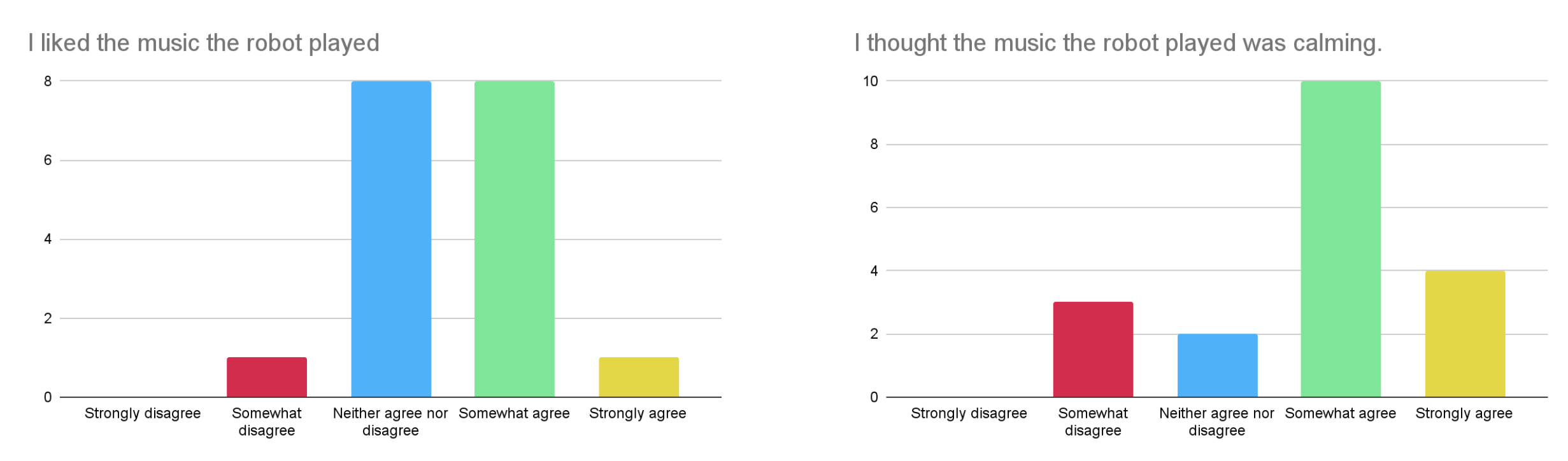
Figure 2: Answers of the test personas regarding music
EVEA (Mood)
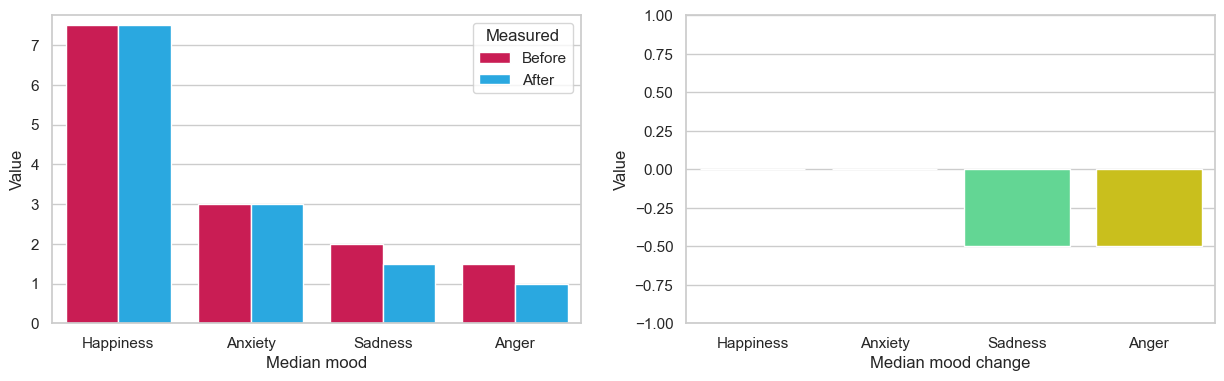
Figure 3: Median measured moods for the simple version of the robot
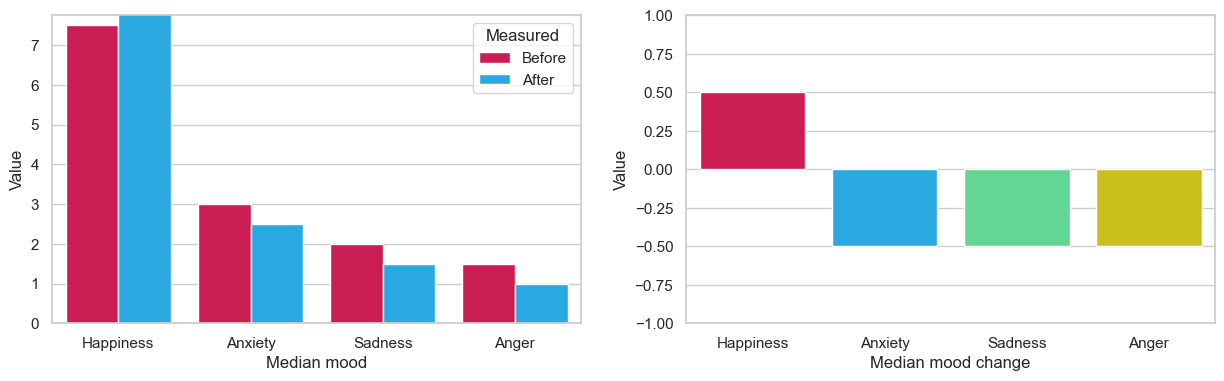
Figure 4: Median measured moods for the advanced version of the robot
Table 1: Wilcoxon signed rank test results for the hypothesis that the mood changed during the interaction with the simple robot
| Mood | Happiness | Anxiety | Sadness | Anger |
|---|---|---|---|---|
| Statistic | 37 | 5 | 4 | 14 |
| P-value | 0.54 | 0.01 | 0.01 | 0.45 |
Table 2: Wilcoxon signed rank test results for the null hypothesis that the mood changed during the interaction with the advanced robot
| Mood | Happiness | Anxiety | Sadness | Anger |
|---|---|---|---|---|
| Statistic | 32 | 11 | 2 | 17 |
| P-value | 0.18 | 0.01 | 0.01 | 0.45 |
Table 3: Wilcoxon signed rank test results for the null hypothesis that the mood decreased during the interaction with the simple robot
| Mood | Anxiety | Sadness | Anger |
|---|---|---|---|
| Statistic | 81 | 53 | 29 |
| P-value | 0.01 | 0.00 | 0.23 |
Table 4: Wilcoxon signed rank test results for the null hypothesis that the mood decreased during the interaction with the advanced robot
| Mood | Anxiety | Sadness | Anger |
|---|---|---|---|
| Statistic | 32 | 149 | 52 |
| P-value | 0.00 | 0.01 | 0.07 |
Table 5: Wilcoxon signed rank test results for the null hypothesis that the mood increased during the interaction with the simple robot
| Mood | Happiness |
|---|---|
| Statistic | 37 |
| P-value | 0.27 |
Table 6: Wilcoxon signed rank test results for the null hypothesis that the mood increased during the interaction with the advanced robot
| Mood | Happiness |
|---|---|
| Statistic | 32 |
| P-value | 0.09 |
Table 7: Wilcoxon signed rank test results for the hypothesis that the mood changes with the simple and advanced robots during the interaction are different
| Mood | Happiness | Anxiety | Sadness | Anger |
|---|---|---|---|---|
| Statistic | 92 | 49 | 85 | 69 |
| P-value | 0.92 | 0.07 | 0.71 | 0.31 |
Godspeed
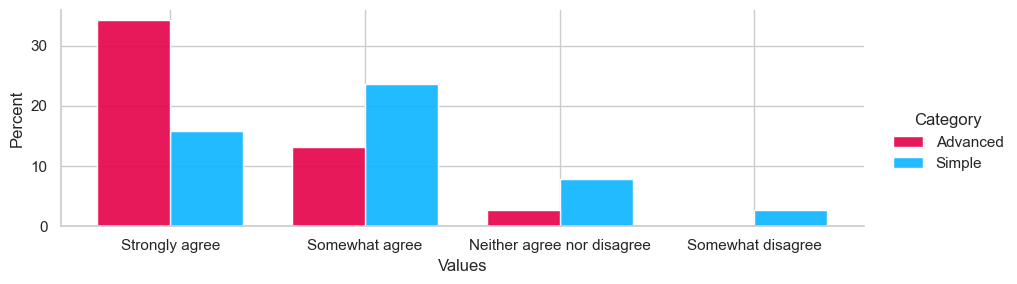
Figure 5: Answers to the statement 'I thought the robot was friendly'
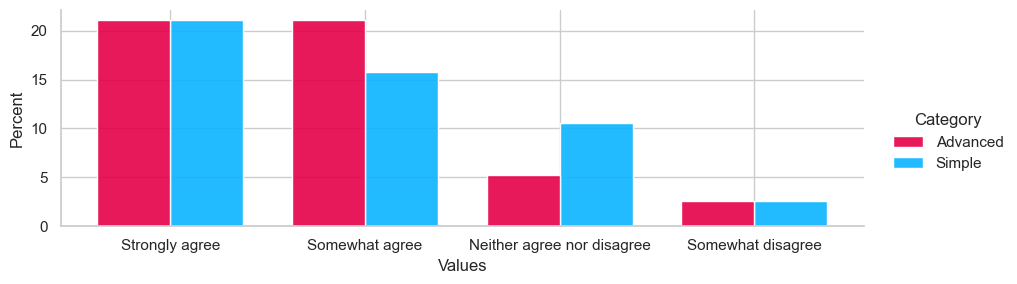
Figure 6: Answers to the statement 'I thought the robot was pleasant'
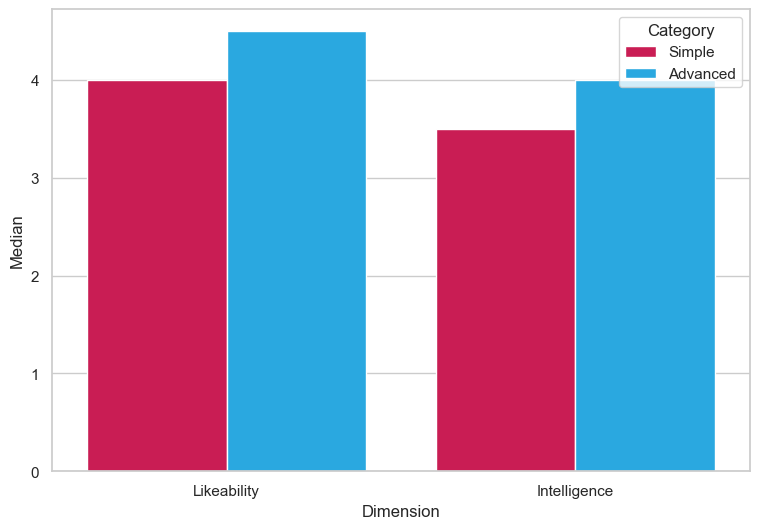
Figure 7: Median measured Godspeed questionnaire dimensions
Table 8: Wilcoxon signed rank test results for the null hypothesis that the advanced robot scored higher in the perceived dimensions
| Dimension | Likeability | Intelligence |
|---|---|---|
| Statistic | 36 | 70 |
| P-value | 0.01 | 0.17 |
Qualitative Results: Quotes and observations
As described, during the experiment, the interaction between the participants and the robot was observed. This section will elaborate on findings from those observations and quotes from participants.
After each interaction section, the the participant was asked how the interaction with the robot felt. From the interaction with the less intelligent version of the robot, some interesting quotes were:
- “The robot was bit direct.”
- “Efficient interaction, but less friendly than the other interaction.”
- “Strange, I did not catch the questions.”
- “It felt short.”
Some of these quotes stress the fact that the less intelligent prototype interaction was rather short and direct. It should be said that the sequence of the interactions seemed to have some impact on how the participants experienced the interaction. Some participants who first experienced the less intelligent prototype were smiling and positively surprised during this interaction, while others who first experienced the intelligent prototype were over all smiling less while interacting with the less intelligent robot.
From the interaction with the intelligent version of the robot, some interesting quotes were:
- “I think it’s perfect, the robot is very friendly. I liked that the robot sat down with me after a while.”
- “The interaction felt quite natural.”
- “Nao answered pretty quickly, you don’t have to wait for an answer. It is quite a happy robot.”
- “Suggestion to eat was still a bit on the side, a little subtle if I would have dementia.”
- “Very nice, calming, I could have stayed longer with the music.”
- “It was good, natural, understands what I’m saying.”
Some participants clearly expressed how friendly they found the intelligent version of the robot. The sequence of the interactions did not seem to impact their feeling about the interaction as much as with the interaction with the less intelligent version of the robot.
Some reported that the interaction felt natural and intuitive.
As for the music, some participants told us that the music did was a useful and pleasant addition to the interaction with the robot.
As for the suggestion to eat and drink, one participant reported that the suggestions to eat and drink were perhaps too friendly and too subtle.
From our observations, it seemed as if participants were either smiling more during the interaction with the intelligent version of the robot or concentrating on the interaction more carefully compared to the interaction with the less intelligent version of the robot.
Discussion
Analysis the results surfaced some minor issues in the experiment, such as the lack of comparison with two robots of similar features, with and without music. Also the practical limitations in the setup, such as the lack of different food options and some participants being aware of the design goals of the prototype could have interfered with the natural flow of the intercourse. With these limitations, the research method was successful in extracting differences within the robots and brought up additional directions for future research.
The most interesting direction for future research would be the longer term studying of the effect of mealtime reminders on the health of the test subjects. The longer term health study would uncover the effect on eating frequency and the development of the relationship with the robot, for example would the test subjects that were first excited about the novel interaction with the robot, develop negative feelings about the supervision that the robot is conducting into their personal life.
Another topic to study is the differences with and without music. The effects of music could be studied with the music tailored to personal taste and all versions of the robot with and without the music playback included in the interaction. This would allow to pinpoint the effects of music, without the other features causing variance.
Lastly, the observations and interviews with the participants clearly demonstrated that for now, that a more friendly and intelligent robot does make the interaction with the robot more pleasant.
Conclusions
From the results we can see that the more advanced robot shows advantages over the simple version in many categories. Hints of better performance in other categories can be seen, but no conclusions should be drawn from the ones that lack the statistical significance.
In improving the eating, it seems that both robots have limited success in causing the people to eat as seen in Figure 1, they could cause the patients to eat more regularly, if triggered by timers or other suitable systems. It also seems that the advanced robot is better in the reminding, by a slight margin. However, the long term effects of reminding should be researched more to conclude whether the usage of the demonstrated robot platform or similar would cause the patients to eat more regularly. It is also unclear how the test setup and the limited choice of food affected the eating.
Based on the answers of the participants regarding music seen in Figure 2, it seems that most of them were either indifferent or liked the music. Also, as the test personnel find the advanced robot more likeable with a 5% confidence limit (Table 7), and the advanced version was the only version with music, it seems likely that the music does make the interaction more pleasant for the personas. However, some of the likeability might be due to the other advanced features of the robot and thus more research is needed to conclude the effect of the music.
The EVEA and partial Godspeed result can be seen in Figures 3-7 and Tables 1-8. The results show that with reasonable confidence (5% confidence limit), both versions of the robot decreased sadness and anxiety in the test personas. Hints are shown (10% confidence limit) that the advanced robot also decreases feelings of anger and increases happiness, while the simple robot fails to show similar results. However, in Table 7 we can see that the statistical differences in the mood differences during the interactions with the different versions are not highly significant.
A Wilcoxon signed rank test for the partial Godspeed test shows in Table 8 that with high confidence (1% confidence limit), the intelligent robot is more likeable in comparison to the simple robot. With these results it is likely that the more advanced robot is slightly preferrable and the personas might experience less negative emotions after the interaction with the robots, but it is slightly unclear if the effect is more powerful with the advanced robot.
Appendix
Experiment introduction for participants
Hi, we are <NAME> and <NAME> from the TU Delft Socio-Cognitive Engeering course Group 1, thank you for participating in our prototype evaluation experiment. The experiment is being conducted as a part of the TU Delft course on Socio-Cognitive Engineering and aims to evaluate the prototype designed as a part of the course. The evaluated prototype is based on the Nao robot-platform and is intended to improve the wellbeing of people suffering of dementia.
Consuming food and/or water can be a consequence of the interaction between you and the robot. Therefore, we would like to ask you if you have any allergies. If you have a form of Diabetes, please let us know before we start the first part of the experiment. You are strongly encouraged to share any other health conditions that can possibly be relevant to take into account when doing an experiment with robots and food with us.
The link between the stimuli of the Nao-robot and the triggering of epileptic seizures is yet unknown. If you have ever experienced epileptic seizures, please let us know. Then, we could see if any special precautions are needed.
The experiment will last for approximately 15-20 minutes, and consists of two interaction sections with the Nao robot, as well as questionnaires before, between and after the sections. We kindly ask you to act naturally during the experiment and fill the questionnaires truthfully and intuitively. Remember that we are evaluating the prototypes performance, not yours. You can stop the experiment at any time.
We will be collecting data of the questionnaires and recording some experiments, do you agree with your experiment being recorded? All data excluding the recordings will be anonymised before analysis and storage. The recordings will not be shared with third parties. After the experiment you have the right to ask for information about the collected data and revoke the right to use it. We kindly ask you not to share any information about the experiment with other participants.
Do you have any questions?
After research interview
Setup:
The test subject has finished both parts of the experiment. Before leaving the test conductor(s) sit down with them and ask the following questions in a discussion about the experiment. Discussion can flow freely, but the following topics should be discussed.
Topics:
- Emotions before / during / after the interaction with the robot
- Agitation due to the robot suggesting eating
- Effect of music on the general feeling of the situation
- Feeling of company during eating
- Effectiveness of eating/drinking suggestions
Questions:
- Did you eat or drink anything during the experiment?
- Were you feeling hungry/thirsty beforehand and did the discourse change this?
- On a scale of 1-10, how likely would you have eaten/drank without the robot suggesting it?
- What did the interaction with the robot feel like?
- With the more intelligent version?
- With the less intelligent version?
- What did you feel like when the robot suggested you should eat/drink?