
Social Robot
1.1 Introduction
In the context of our project, the choice of the robot plays an important role in supporting the interaction design, specifically for reducing caregiver workload and enhancing the engagement of PwDs during group conversation activities. Selecting the right robot requires careful consideration of factors such as physical appearance, interaction capabilities, ease of programming, and suitability for the target user group (elderly participants).
We considered several available social robots as potential candidates for our application, including Navel, NAO, Pepper, and Miro-E. Each of these robots offers different features, but not all align well with the specific socio-cognitive goals and practical constraints of our use case.
1.2 Comparison of Social Robots
- NAO and Miro-E are relatively small and risk appearing toy-like, which can negatively affect how elderly participants perceive the robot. Previous research suggests that older adults tend to prefer life-sized humanoid robots over smaller, animal-like, or toy-like designs, as they find these more socially engaging. [1] This makes NAO and Miro-E less suitable for our setting.
- Navel provides a highly human-like figure and advanced interaction capabilities. However, it does not have a tablet interface, which we consider essential for providing visual prompts that can support PwDs who may struggle with hearing or memory.
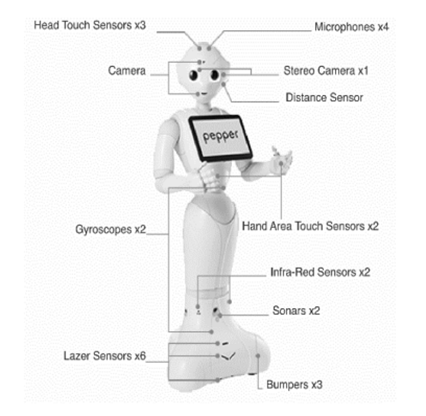
- Pepper, on the other hand, presents an optimal balance between physical presence, ease of programming, and interactive features. Pepper is a life-sized humanoid robot, designed specifically for social interaction scenarios. It includes a large tablet interface, allowing multimodal interaction (voice and visual support), which is especially helpful for our user group where redundancy in information presentation (visual + auditory) can improve understanding and engagement. Moreover, Pepper has been successfully deployed in previous studies with elderly populations, including those with dementia, where its interaction was found to be engaging and supportive of well-being [2].
1.1 Pepper Robot
1.3 Why Pepper is the Right Fit for This Use Case
The main reasons for choosing Pepper are:
- Support for Multimodal Communication: The combination of speech and a large, easy-to-read tablet allows for better accessibility, helping PwDs follow the conversation even if they have hearing or cognitive difficulties.
- Acceptance: Pepper’s humanoid design avoids the toy-like perception of smaller robots, while still being approachable and friendly. Studies confirm that this form factor increases acceptance and engagement among elderly users [1].
- Ease of Development: Pepper offers Python-based programming and a well-documented SDK, which simplifies the implementation of our interaction logic and chatbot features within the time constraints of the course project.
- Proven Use in Healthcare and Elderly Care: Previous research has shown that Pepper can effectively support social interaction with older adults and even with people with psychiatric disorders [3]. These studies suggest that Pepper is not only technically capable but also socially appropriate for therapeutic and care environments.
1.4 Considerations
While Pepper provides many advantages, there are also some limitations that we considered:
- Limited mobility: Pepper is not designed for dynamic physical assistance or complex navigation. However, this is not required for our use case, where the robot remains stationary during conversation sessions and have just to do simple paths roaming around the discussion groups.
- Fixed speech recognition capabilities: Pepper’s built-in speech recognition may not handle group conversations well. To address this, we plan to integrate external speech recognition tools (e.g., Google Speech-to-Text or Whisper), as discussed in the previous section.
2.0 References:
[1]Broekens, Joost, Marcel Heerink, and Henk Rosendal. "Assistive social robots in elderly care: a review." Gerontechnology 8.2 (2009): 94-103.
[2]Liao Y-J, Jao Y-L, Boltz M, et al. Use of a Humanoid Robot in Supporting Dementia Care: A Qualitative Analysis. SAGE Open Nursing. 2023;9. doi:10.1177/23779608231179528
[3] Neerincx, M.A., van Vught, W., Blanson Henkemans, O., Oleari, E., Broekens, J., Peters, R., Kaptein, F., Demiris, Y., Kiefer, B., Fumagalli, D. and Bierman, B. (2019). Socio-Cognitive Engineering of a Robotic Partner for Child’s Diabetes Self-Management. Frontiers in Robotics and AI, 6. doi:https://doi.org/10.3389/frobt.2019.00118.
[4] Abdel-Hamid, Ossama, et al. “Convolutional Neural Networks for Speech Recognition.” IEEE/ACM Transactions on Audio, Speech, and Language Processing, vol. 22, no. 10, Oct. 2014, pp. 1533–1545, www.microsoft.com/en-us/research/wp-content/uploads/2016/02/CNN_ASLPTrans2-14.pdf, https://doi.org/10.1109/taslp.2014.2339736. Accessed 20 Nov. 2019.