Test
The best way to test our prototype would be a study with persons with dementia. However, testing the robot in a real environment would be very time-consuming, because it is not predictable if and when people with dementia start wandering. Hence it is out of the scope of this project.
Nevertheless, we wanted to get a first impression of how realistic and convincing the provided dialogues and suggested activities are. In a small study with students, who play the role of having dementia, we are observing the interaction with the robot with an aim to find out how effective it is in preventing people from wandering.
Problem statement and research questions
Goal: How effective is music and dialogue in preventing people with dementia from wandering?
Research Questions (RQ):
- What percentage of people are prevented from going out unsupervised? (Quantitative) (CL01, CL05)
- How does the interaction change the participant's mood? (CL02)
- Can the robot respond appropriately to the participant's intention? (CL03)
- How do the participants react to the music? (CL04)
- Does the activity that the robot suggests prevent people from wandering/ leaving? (CL06)
- Can pepper identify and catch the attention of the PwD?
Future research questions
- Does the interaction with Pepper make PwD come back to reality? (CL08)
- Does the interaction with Pepper make PwD feel he/she is losing freedom? (CL09)
- Does preventing the participant from going out alone make them feel dependent? (CL10)
Method
A between-subject study with students who play the role of having dementia. Data will be collected with a questionnaire (before and after participation), observing the participant's body language and the way that they're responding to Pepper.
Participants
18 students who play the role of having dementia. They will be divided into two groups. One group (11 participants) will be interacting with the intelligent (group 1) robot while the other group (7 students) will interact with the unintelligent robot (group 2).
It is assumed that all participants are living at the same care center.
Before they start, they can choose how stubborn they want to be and where they want to go.
Experimental design
All questions collect quantitative data, using a 5 point Likert scale wherever applicable.
- Observe the participant's mood and see how the conversation goes. Observe the level of aggression (tone, volume, pace)
- Observe whether the mood is improved and the decision has been changed.
- Observe how natural the conversation is. (conversation makes sense)
- Participants fill out questionnaires.
Tasks
Because our participants only play the role of having dementia, we will give them a level of stubbornness/ willpower with they are trying to leave. We try to detect this level with the robot.
Participants from group 1 (using intelligent robot) will also be given one of the reasons to leave, listed below:
- going to the supermarket
- going to the office
- going for a walk
After this preparation, the participant is told to (try to) leave the building. The participant and robot have an interaction where the robot is trying to convince the participant to stay inside.
Measures
We will be measuring this physically and emotionally.
Physically: whether the participant was stopped from leaving the building or not.
Emotionally: evaluate their responses to the robot and observe their mood before and after the interaction.
Procedure
| Group 1 | Group 2 |
|---|---|
| intelligent robot | unintelligent robot |
|
1. Starts with a short briefing on what we expect from the participant 2. Let them fill out the informed consent form 3. Tell them their level of stubbornness and reason to leave 4. Fill out question about current mood (in their role) 4. Let the user interact with the robot 5. While user is interacting, we will be observing the conversation with the robot 6. Let user fill out the questionnaire about their experience after the interaction |
1. Starts with a short briefing on what we expect from the participant 2. Let them fill out the informed consent form 4. Fill out question about current mood (in their role) 5. Let the user interact with the robot 6. Let user fill out the questionnaire about their experience after the interaction |
Material
Pepper, laptop, door, and music.
Results
RQ1: Are people convinced not to go out unsupervised?

|
Comment on the graph |
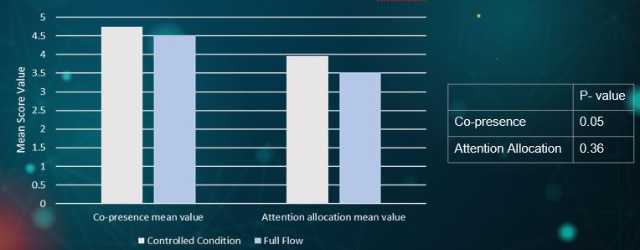
RQ2: How does the interaction change the participant's mood?
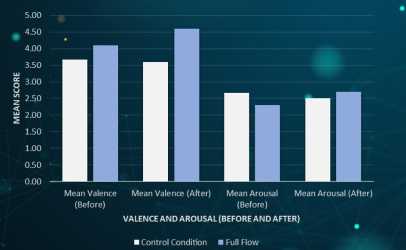
|
Comment on the graph |
RQ3: Can the robot respond appropriately to the participant's intention?
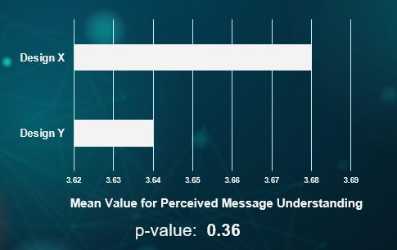
|
Comment on the graph |
RQ4: How do the participants react to the music?
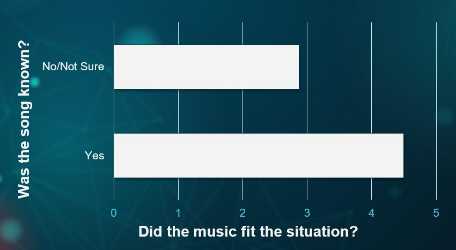
|
Comment on the graph |
RQ5: Does the activity that the robot suggests prevent people from wandering/ leaving?
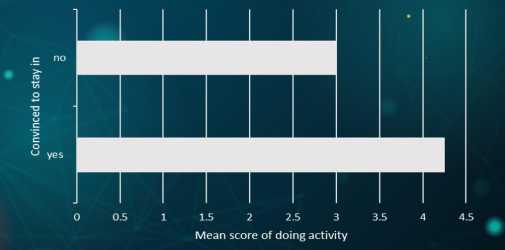
|
Comment on the graph |
RQ6: Can pepper identify and catch the attention of the PwD?
|
Comment on the graph |
Reliabity Scores
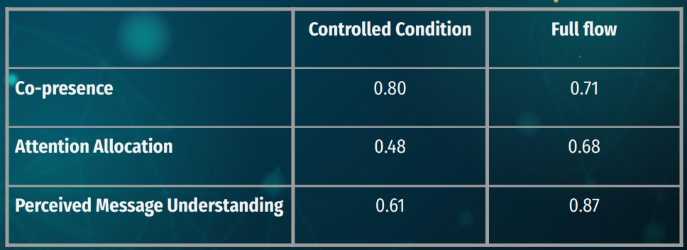
|
Comment on the graph |
Limitation
- Lab Environment: The lab environment is different from a care home, the participants found it difficult to process the suggestions made by Pepper. For example, if Pepper asked someone to visit the living room, it created confusion among the participants regarding their next action.
- Role-Playing: Participants for the experiment are not actual patients suffering from dementia. Hence it is naturally difficult for them to enact the situations and replicate the mental state of an actual person suffering from dementia.
- Speech Recognition: The speech recognition module inside Pepper is not perfect. Therefore, in certain cases, Pepper misinterpreted words spoken by the participants and triggered an erroneous dialogue flow. The problems commonly occurred with words that sound similar such as "work" and "walk". Moreover, there are some additional hardware limitations that hampered the efficiency of the speech recognition system. One prominent issue is that the microphone within Pepper is only active when the speaker is turned off. A blue light in the eye of Pepper indicated the operation of the microphone. Since most of the participants are not used to interacting with Pepper found it difficult to keep this limitation in mind while trying to have a natural conversation.
- Face Detection: The face recognition module within Pepper is also rudimentary in nature. It can not detect half faces are when participants approach from the side. Adding to the problem, the lighting condition in the lab was not sufficient for the reliable functioning of the face recognition module. Hence Pepper failed to notice the participant in some cases and did not start the dialogue flow.
Conclusions
- People who liked the activity tend to stay in
- People who knew the music found it more fitting
- People are more convinced to stay in with the intelligent prototype
- Cannot conclude whether moods were improved
- Need to experiment with the actual target user group to derive on concrete conclusion
- Experiment with personalization
Future Work
- Personalisation: Personalize music, and activity preferences according to the person interacting with Pepper.
- Robot Collaboration: Collaborate with other robots such as Miro to assist a person with dementia while going for a walk instead of the caretaker.
- Recognise Person: For a personalised experience, it is essential that Pepper is able to identify each person based on an internal database.
- Fine Tune Speech Recognition: Improvements are necessary for the speech recognition module before the actual deployment of the project in a care home. Additionally, support for multiple languages can be considered to engage with non-English speaking people.