Storyboard
We thought of 2 different story boards that we believe nicely show the intended use cases of the system. They show the different paths the system can take in an interaction and illustrate what the system can be expected to do in similar situations.
Scene 1
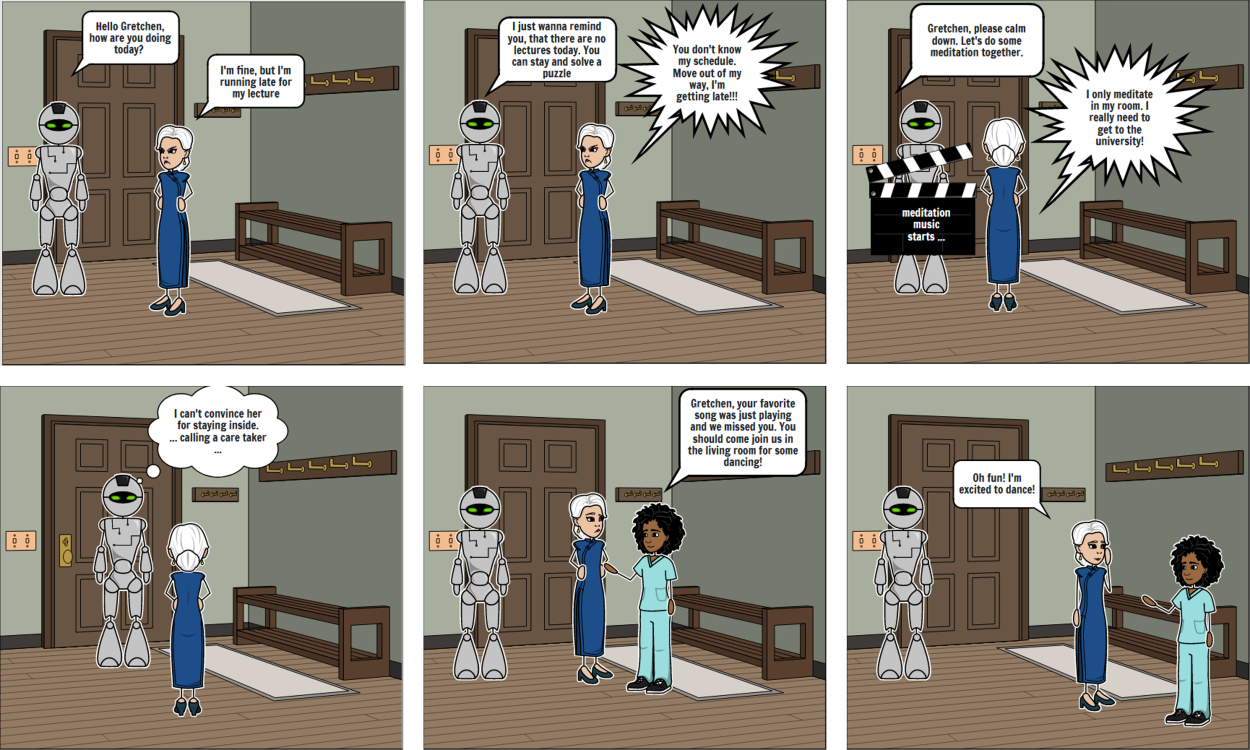
The first situation we considered is the case where a person with dementia is under the impression that they are in a different period in their life and will not be convinced otherwise by the system. In the first frame, we can see the person with dementia (Gretchen) tell the robot (Pepper) that she is on her way to a lecture - which Pepper knows is not the case, as she retired before being admitted to the care home. In the second frame, Pepper attempts to convince Gretchen to stay with an argument applicable to her perceived situation. It also suggests an alternative which can be performed inside the care home, in this case solving a puzzle. Pepper would also softly start playing calm music at this point to try to get Gretchen back to reality and make her realise by herself that she is retired. However, Gretchen responds negatively to these stimuli, stating that Pepper should leave her alone and let her go about her day. Pepper in turn responds to this by trying to calm Gretchen. It does so by playing calming music associated with an activity, and explicitly suggesting that Gretchen takes part in the activity, as displayed in frame 3. Gretchen still responds negatively to this, and even becomes noticeably agitated. After this, in frame 4, Pepper recognises its intervention is not improving the situation, and it decides to ask the caretaker to help. The caretaker arrives in frame 5 and successfully takes Gretchen back to a different room.
Scene 2

TDP
| Problem | The caretaker of a person with dementia (PwD) might not always be around to prevent a user from going out wandering, and to locate them and bring them back if they do. To still be able to provide a safe environments for all PwD's, a humanoid robot will try to take care of such situations. This will relieve the caretakers from a number of these burdens. There might, however, be cases where the robot cannot do enough, and thus needs to alert a caretaker that can interfere. |
| Solution structure | 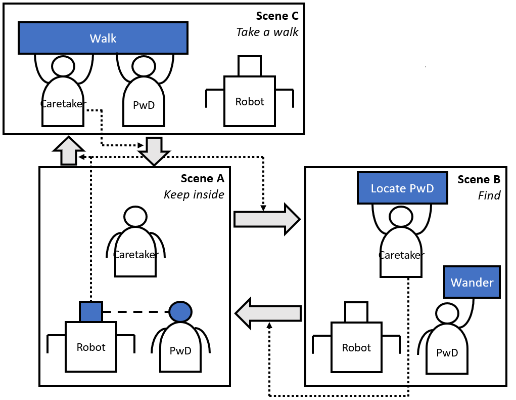 |
| Solution description | In the event that a PwD wants to leave the building, the robot will interact with them. The goal of this interaction is to convince the PwD to stay inside. This can be done by asking certain questions to identify the intentions and mental state of the PwD, and responding with certain arguments or alternatives. If this is unsuccessful and the PwD goes out nonetheless, the robot will alert a caretaker of this event, transitioning from Scene A to Scene B. The caretaker will respond to this as soon as possible to prevent the PwD from going too far or getting into too many dangerous situations. The caretaker will go after the PwD, track them down and bring them back inside safely, after which the setting returns to Scene A. |
| Human RQ | The caretaker needs to be available to respond in a relatively small amount of time and needs to be able to track down the PwD faster than they can wander. |
| Robot RQ | TODO create RQ |
IDP1
| Problem | Sometimes, a person with dementia (PwD) might want to go out for a very trivial reason - for example, they might want to go to a doctor's appointment, do groceries or have coffee with the neighbours. In such cases, a rather simple counterargument might be more than enough to have these people stay inside. Alternatively, a different activity might be a reason for them to stay in as well. In such situations, the robot should be able to provide these counterarguments or activities. |
| Solution structure |  |
| Solution description | Once the PwD tries to leave the building, the robot will ask what the PwD is planning on doing. This response will most likely be of the form presented in the upper arrow, stating that they will be doing some activity. Based on the nature of the activity, the robot will try to find an appropriate response. For example, in the case of a non-existent appointment the robot will tell the user this appointment is on some other day, errands will be said to be covered by others, and people that are unwise to visit will be said to be on vacation or at work. In addition, and as a fallback in cases where no more appropriate response can be found, the robot will think of an alternative to the activity to occupy the PwD, and tell the PwD they will miss this activity if they leave now. These arguments should, at least in some cases, be enough to keep the person in. |
| Human RQ | The PwD needs to be able to state their intent and listen to what the robot has to say. |
| Robot RQ | TODO create RQ |
IDP2
| Problem | Sometimes, a person with dementia (PwD) might want to go out for a very trivial reason - for example, they might want to go to a doctor's appointment, do groceries or have coffee with the neighbours. A robot would say some simple counterarguments to persuade them to stay inside, but in some cases the PwD insist to going out and becoming agitated, then the robot will play music to make the PwD calm down, if this still doesn't work and they still have to go out, then the robot will call the caretaker immediately. |
| Solution structure |  |
| Solution description | If the PwD still wants to go out and becomes agitated, after the robot provides some counterarguments, then the robot will play some specific agitation-relieving music to make the PwD calm down. If it works, then the PwD keeps stay inside, otherwise, the robot will call the caretaker. |
| Human RQ | The PwD needs to be able to state their intent and listen to what the robot has to say. |
| Robot RQ | |
- Play some specific agitation-relieving music
- Response to PwDs conversations.
- Call the caretaker
IDP3
| Problem | Sometimes, a person with dementia (PwD) might want to go out for a very trivial reason - for example, they might want to go to a doctor's appointment, do groceries or have coffee with the neighbours. A robot would say some simple counterarguments to persuade them to stay inside, but in some cases the PwD leaves the room directly without talking to the Robot or ignoring counterarguments provided by the robot, then the robot will call the caretaker immediately. |
| Solution structure |  |
| Solution description | When the PwD ignores the robot's counterarguments and walks out of the room, or doesn't talk to the robot at all and walks out of the room directly, then the robot will call the caretaker. |
| Human RQ |
|
| Robot RQ | |
- Call the caretaker
- Response to PwDs conversations.