Humanoid Robot
Robot Choice
We were offered to work with three robots: Pepper, Nao and Miro.
As our main goal is to improve the quality of life of the patient with dementia by providing some social support, we believe that the human size semi-humanoid form of Pepper and its capacity to communicate easily with humans are great comparative advantages to choose it.
Pepper Description
Pepper is a robot that allows easy communication robot/user, thanks to its ability kit that includes:
- Speech recognition
- Voice
- Tablet
- Cameras
- Humanoid form
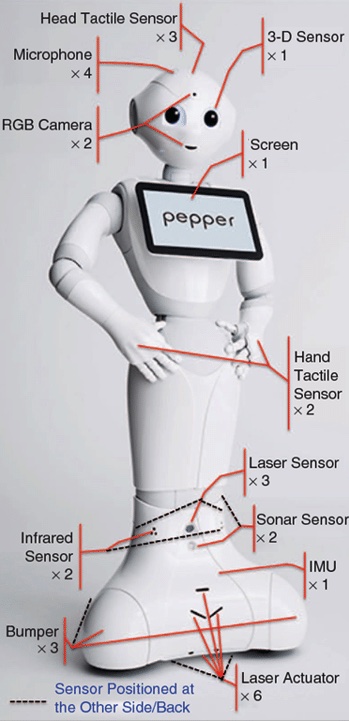
Figure 1: All sensors and actuators provided by Pepper
Pepper usage
We tried to make full use of the sensors provided within Pepper. As we had limited amount of time we mainly focused on working with: the microphones, the speakers, the tablet display and the arms movement of Pepper.
The actions we implemented for our prototype include:
- Playing music
- Listening and understanding the PwD
- Speaking to the PwD
- Displaying information on the tablet
- Moving arms to convey message
For the actual implemented version, we have enabled Pepper to show images about the current activity when interacting with the PwDs, which can not only improve the efficiency of communication between them, but also makes PwDs feel more cared.
Iterative Process
Through the course of the development of Pepper, we followed an iterative process of design where we programmed and re-programmed certain aspects to accommodate weekly feedback. This approach aided us in ameliorating existing functionality, while adding new features. The following is brief indication of how this iterative process looked for our development pipeline:
- Perform a research overview of how Pepper works, and look into the Interactive Robotics platform and Choregraphe
- Make simple initial behaviours on Choregraphe (unrelated to our use cases) tested with the virtual robot
- Make some simple behaviours for our use cases tested with the virtual robot
- Review implemented behaviours using physical version of Pepper
- Make some adjustments and debug according to observed behaviours of previous iteration
- Add new behaviours and test once again with physical version of Pepper
- Test and improve the final behaviours!
PACT analysis
People perform activities in specific contexts with technologies, which affect the situated activities, which set new user requirements.
Using this method leads to a cyclic process of progression as can be seen on the image [1] below presented during the lecture.

Moreover, using Choregraphe, Pepper is highly parameterizable, it is relatively easy to expand the functionalities by programming new blocks, and prototypes can also be done quickly. This is very valuable as we expanded every week our prototype to include new features based on the content from the lectures.
For more information on our use of Pepper to help people with dementia, please check the Robotic Partner section.
[1]: Benyon, David (2019). Designing User Experience: A Guide to HCI, UX and Interaction Design. Pearson UK.