Design Patterns
This section will explore two types of design patterns. We have made a team design pattern and three interaction design patterns that are applied in WAF. More information about design patterns can be found here
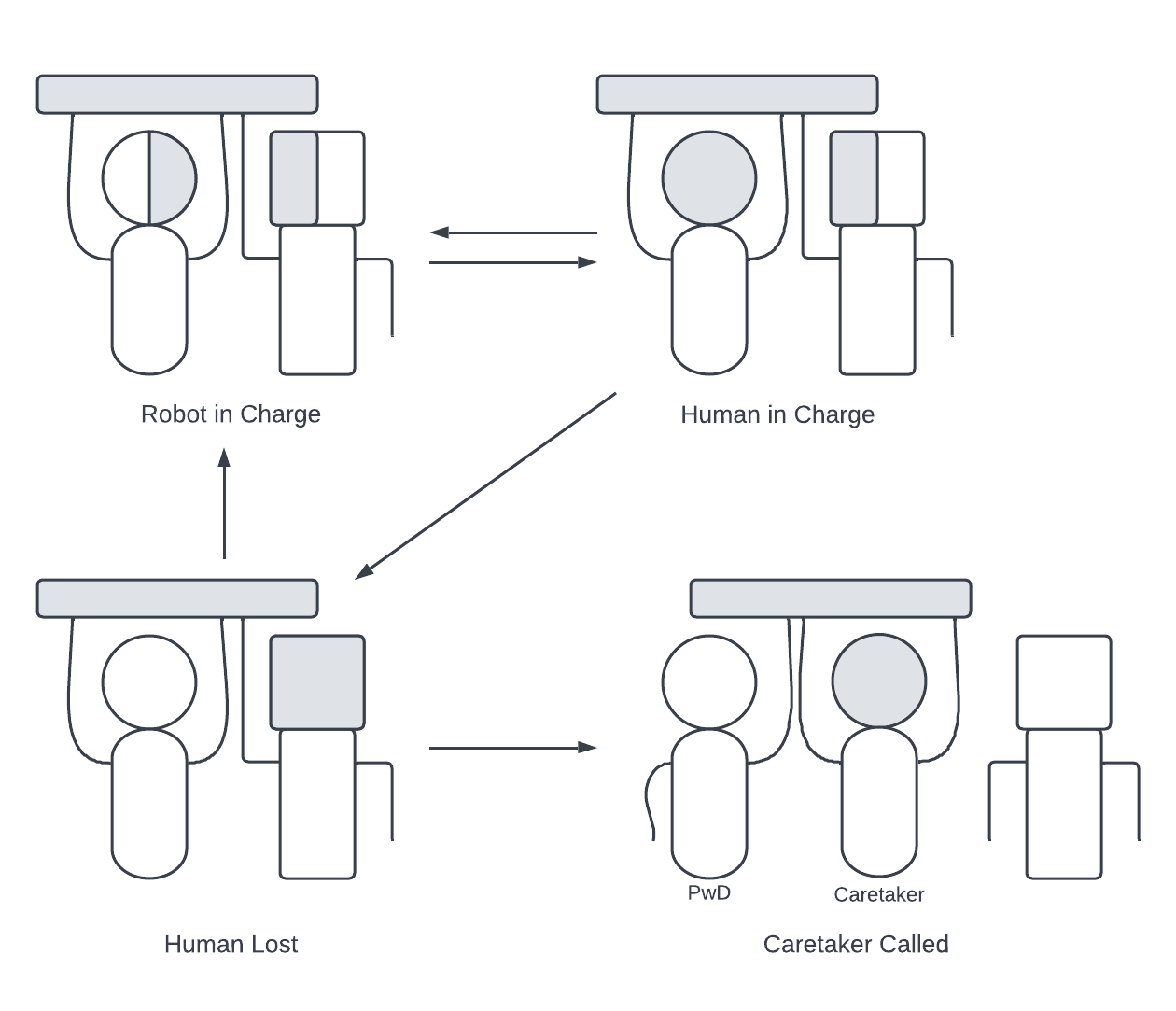
Team Design Pattern
Interaction Design Pattern
Interaction design patterns are generalized and reusable interactions. These are not specific to our product, but we have of course applied them. For these design patterns, we assume a robot that can move around and make sounds, but cannot speak. We will mostly use humanoid or animal-like robots that show emotions in some way, though the design patterns could work for different types of robots, such as more industrial solutions.
Guiding the human while walking pattern
To guide a human, a robot can walk in front of them. On straight paths this will not be an issue. When there are turns, the robot could indicate which direction it is going. This could for example be done by indicator lights in some settings, but for more human or animal-like acting robots, this could be done by already slightly moving in the correct direction, or looking towards the correct direction. These two options are fairly subtle, but should be noticeable by a human that's paying attention. If the human goes in the wrong direction, we can follow the guiding human back pattern described below.
Guiding human back pattern
When a human strays off the path, the robot is likely not in their range of vision anymore. The robot will follow the human for a little bit, then ask for attention by making sounds. Then the robot should face the correct path, as to not look like its still trying to guide the human. For human or animal-like robots, the robot could show excitement and anticipation about the correct path, for example by wagging its tail or moving in an excited way. The robot should also show positive emotions when the human decides to take the correct path. Furthermore, the robot could show negative emotions when the human continues on the incorrect path. Negative feedback should however be done with care.
When the human is taking the wrong path, it is likely the robot needs to get the humans attention back. To this end, we can use the getting attention pattern as described below.
Getting attention pattern
The main way to get the humans attention is through sound. Multiple types of sound can be thought of, also depending on the urgency of the situation. For non-urgent attention, you could think about a bell, bark, or buzz. To urgently get the human's attention, an alarm, a scared howl, or screaming could be appropriate. If the robot is somewhat in the vision field of the human, but not noticed, for example because it is in their peripheral vision or their attention is somewhere else, the robot could try light and movement to get their attention. If nothing else works, moving into the humans direct field of view is an option, possibly accompanied by techniques discussed earlier if the human is particularly distracted or disoriented.
How WAF applies these patterns
WAF applies these three patterns in an emotional and more subtle way. It should feel as much as a dog as possible, instead of feeling like a robot. To this end, the sounds used in the getting attention pattern will be dog sounds. For urgent situations, for example when the resident falls over, WAF will use an alarm to get the caretaker's attention.